Autonomna cestovna vozila - Robote, vozi polako
Autonomna vozila, vozila su sposobna raspoznati svoju okolinu i sigurno se kretati, uz malo ili bez ljudskog upravljanja. Kako još uvijek postoje tehnološke prepreke za postizanje potpune autonomnosti vozila, uobičajeno je govoriti o stupnjevima autonomnosti vozila. Evolucija razvoja autonomnih vozila odvija se u fazama, slično kao i kod razvoja automobila, koji je počeo od prvih sporih, parnih pogona, do automobila na benzinski pogon pa do današnjih, potpuno električnih vozila
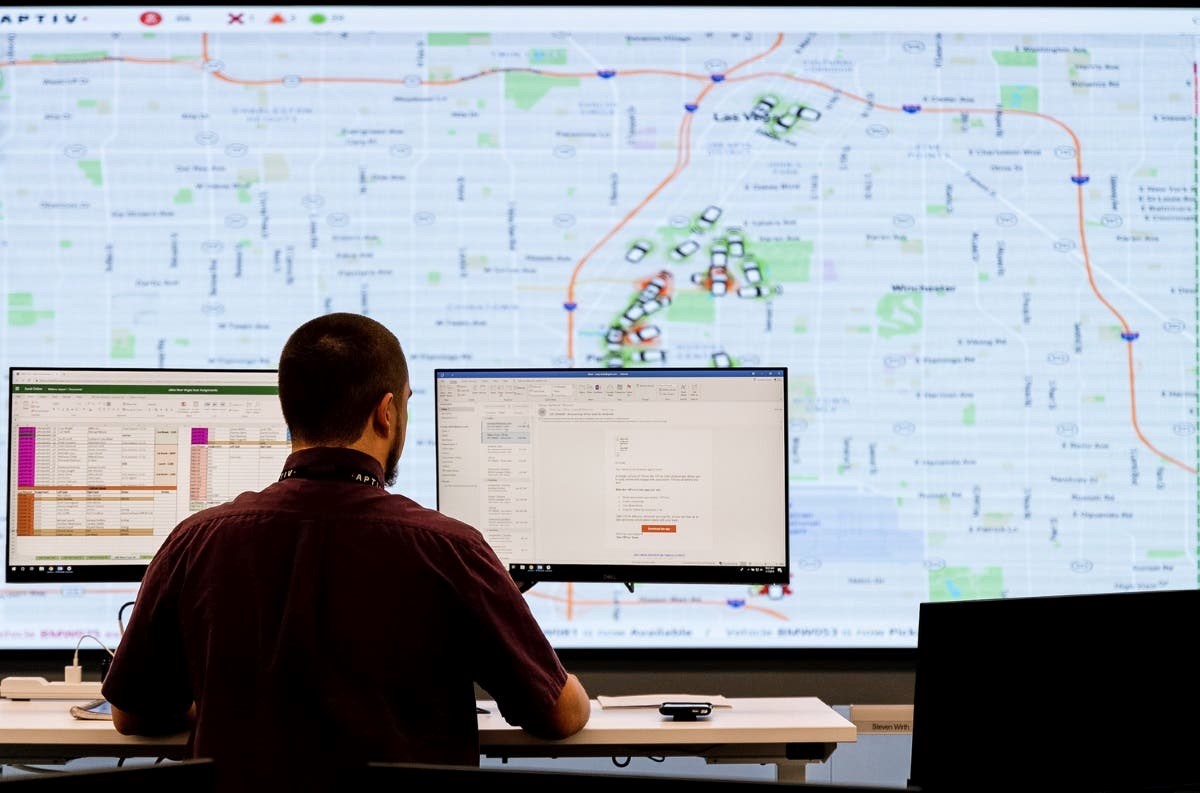
Ključ za sljedeći skok od današnjih vozila autonomnosti 2/3, čiji su prtljažnici prepuni nosača poslužitelja, koja već voze cestama Kalifornije i Singapura, do vozila kojima ćemo zaista funkcionalno putovati – pronaći je rješenje kako postaviti veću računalnu snagu u manje prostora. Uz ulaganje od dvije milijarde dolara u istraživanje i razvoj, Nvidia je proizvela najsloženiji čip s 9 milijardi tranzistora za primjenu u autonomnim vozilima, kakav dosad nije postojao.
Stupanj autonomnosti vozila izravno je povezan s njegovom tehnološkom složenosti. Današnja vozila opremljena su različitim senzorima, poput radara, lidara, sonara, GPS-a (u nekima je i Galileo), odometrije i slično. Napredni upravljački sustavi takvih vozila razumiju prikupljene podatke, i pomoću njih identificiraju odgovarajuće navigacijske upute, prepreke na koje nailaze, ostala vozila, pješake i relevantne prometne znakove, i mnogo drugog. Projekti razvoja potpuno autonomnog komercijalnog automobila u različitim su fazama razvoja. Prema istraživanju kompanije Allied Market Research, tržište autonomnih automobila moglo bi doseći do 556,67 milijardi USD u 2026., uz prosječnu godišnju stopu rasta od 39,47%. Također procjenjuju da će prosječna godišnja stopa rasta u Europi najviše rasti 42,6% do 2026. godine.
Stvaranje pritiska
U međuvremenu, Tesla, Uber, Lyft, Waymo i postojeći proizvođači automobila, stvaraju ogroman pritisak na razvoj V2X (Vehicle-to-everything) WiFi tehnologije za komunikaciju vozila sa svime u okruženju, kako bi zavladali tržištem. Waymo je postao prvi pružatelj usluga koji je ponudio komercijalnu vožnju robo-taksijima u Phoenixu, u državi Arizona, 2020. godine, a Elon Musk najavio je da će vlasnicima privatnih Tesla vozila ponuditi “potpuno samostalno upravljanje” u 2021. godini. Nadalje, autonomna dostavna tvrtka Nuro dobila je dozvolu koja im omogućuje da komercijalno puste u rad svoje autonomno vozilo na cestama dviju pokrajina u Kaliforniji tijekom ove godine. U širem smislu, smatra se da će autonomna vozila smanjiti troškove prijevozničkih i dostavnih tvrtki, ovisnost o ljudskim vozačima, i pomoći industrijama koje se suočavaju s nedostatkom radne snage.
Izazov za proizvođače autonomnih vozila koji rade na impresivno naprednim sustavima umjetne inteligencije, koje su razvile neke od vodećih tvrtki, poput Nvidije i Intela, proizvodnja je sigurnijih vozila od tradicionalnih automobila. Autonomna vozila oslanjaju se na računalni vid, područje umjetne inteligencije koje se bavi prepoznavanjem dvodimenzionalnih i/ili trodimenzionalnih predmeta, a koriste ga roboti, odnosno autonomna vozila, kako bi se mogli snalaziti u prostoru, te na radar, lidar, GPS i odometriju za otkrivanje okoline.

Klasifikacija autonomnih vozila
Prvu klasifikaciju autonomnih vozila izradila je 2013. godine National Traffic Safety Administration (NHTSA) i definirala pet razina autonomnosti. Internacionalna udruga automobilskih inženjera Society of Automotive Engineers International (SAE) 2014. godine objavila je klasifikaciju autonomnih vozila u šest razina, pod nazivom SAE J3016: JAN2014 standard. Taj standard 2016. godine dopunili su, i objavili ga pod nazivom SAE J3016:SEP2016 standard.
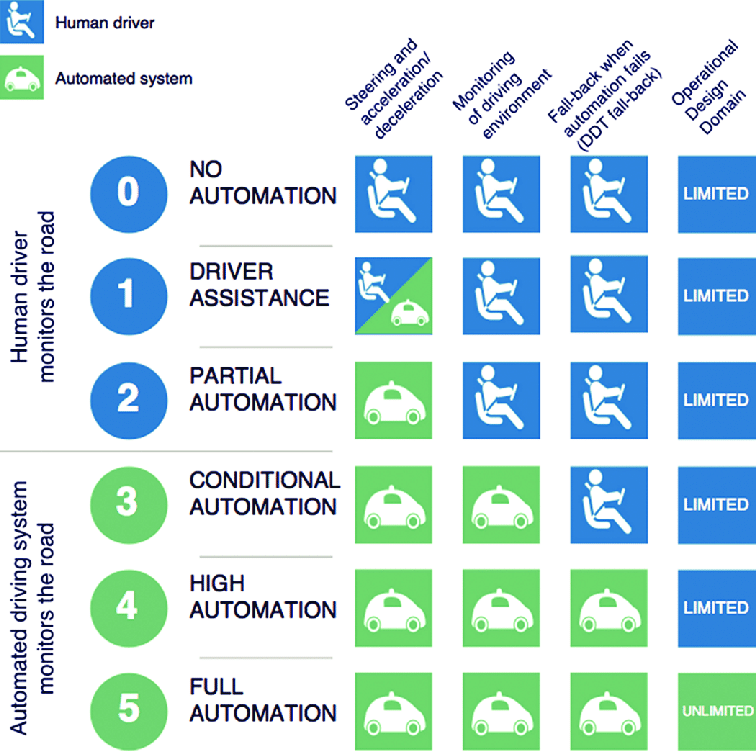
SAE klasifikacija temelji se na količini potrebne intervencije i pozornosti vozača, pa tako SAE J3016:SEP2016 standard definira šest razina automatizacije za automobile, u rasponu od razine 0 (bez automatizacije vožnje) do razine 5 (potpuna automatizacija), postupno prelazeći sa “značajki podrške za vozača” na “značajke automatizirane vožnje”. SAE kategorizaciju naknadno je usvojila NHTSA.
Razine automatizacije razlikuju se prema tome je li za uočavanje okoline, upravljanje kontrolama i globalni nadzor svih vozačkih zadataka odgovoran vozač ili vozilo. Ovisno o scenarijima u kojima je potrebna posebna raspodjela razine odgovornosti, definirane su sljedeće razine autonomnosti vozila:
Nulta razina (no automation) – manualna vožnja u kojoj automatizirani sustav izdaje upozorenja i može trenutačno djelovati, ako je to potrebno
Prva razina (hands on) – sustav pomoći omogućuje vozilu upravljanje ili ubrzavanje i kočenje, ali uz nadzor vozača. Primjer takvih sustava su tempomat i sustav za održavanje u traci
Druga razina (hands off) – vozilo obavlja prva dva zadatka vožnje iz prethodnih razina, a vozač je i dalje odgovoran za nadgledanje vožnje, i mora biti spreman intervenirati u bilo kojem trenutku, ako automatizirani sustav ne reagira pravilno
Treća razina (eyes off) – vozač može sigurno skrenuti pozornost sa zadataka vožnje jer vozilo upravlja svojom putanjom, ali samo kod dobro referencirane putanje, i zbog toga vozač i dalje mora biti spreman za intervenciju
Četvrta razina (mind off) – nikada ne zahtijeva pozornost vozača, a autonomna vožnja podržana je samo u ograničenim područjima, ili u posebnim okolnostima, a izvan tih područja vozilo mora samo prekinuti autonomnu vožnju. Zadaće vozila uključuju operativne (upravljanje, usporavanje, kočenje, ubrzanje i nadzor) i taktičke aspekte (promjena kolničke trake, skretanje, poštivanje prometnih znakova i reakcija na incidentne situacija).
Peta razina (steering wheel optional) – ne zahtijeva prisutnost vozača. Zadaće vozila uključuju operativne (upravljanje, usporavanje, kočenje, ubrzanje i nadzor) i taktičke aspekte (promjena kolničke trake, skretanje, poštivanje prometnih znakova, reakcija na incidentne situacija itd.). Kod pete razine, koja se još naziva i razinom potpune automatizacije, vozač mora samo odrediti odredište i točke zaustavljanja na putu, bez obzira na složenost scenarija.
U službenom listu Europske unije od 27. studenoga 2019., objavljena je Uredba (eu) 2019/2144 Parlamenta i Vijeća EU o zahtjevima za homologaciju tipa za motorna vozila i njihove prikolice te za sustave, dijelove i zasebne tehničke jedinice namijenjene za takva vozila, u pogledu njihove opće sigurnosti te zaštite osoba u vozilima i nezaštićenih sudionika u cestovnom prometu. U navedenoj uredbi navode se definicije za automatizirano vozilo i potpuno autonomno vozilo: “automatizirano vozilo znači motorno vozilo konstruirano i izrađeno kako bi se kretalo autonomno tijekom određenog razdoblja bez stalnog nadzora vozača, ali u odnosu na koje se intervencija vozača ipak očekuje ili je potrebna” i “potpuno automatizirano vozilo znači motorno vozilo koje je konstruirano i izrađeno kako bi se kretalo autonomno bez ikakva nadzora vozača”.
Unatoč definicijama iz Službenog lista Europske unije, uvriježen je termin autonomno vozilo. Autonomno znači samostalno ili neovisno. Autonomna kontrola podrazumijeva zadovoljavajuće performanse vozila u izrazito nesigurnim i iznenadnim uvjetima koji se mogu pojaviti u okruženju vozila, i nadoknađivati kvarove sustava bez vanjske intervencije. Većina koncepata vozila (kojih smo trenutačno svjesni) ima osobu na mjestu vozača, koristi komunikacijsku vezu s oblakom ili drugim vozilima, i nesamostalno odabire odredišta ili rute za njihovo dosezanje. Stoga bi pojam “automatiziran” preciznije opisao te koncepte vozila. U engleskom jeziku termini za autonomno vozilo su self-driving car ili autonomous vehicle (AV, ili samo auto).

Upravljački sustavi autonomnih vozila
Arhitektura upravljačkog sustava autonomnih vozila petog stupnja autonomnosti, prema SAE klasifikaciji, definirana je i podijeljena na četiri segmenta; senzorske sustave, klijentske sustave, akcijske sustave i korisničke sustave.
Autonomna vozila temelje se na naprednim senzorima, koji prikupljaju informacije o okolini, na dubokim višeslojnim neuronskim mrežama i dubokom učenju (engl. Deep Learning), koji se koriste za raspoznavanje prometnica, vozila, objekata i osoba, iz podataka prikupljenih od senzora te za upravljanje vozilom. Dakako, sve to uz veliku računalnu snagu, koja obrađuje informacije i pretvara ih u djelotvorne naredbe, u realnom vremenu. Skupovi senzora na autonomnim vozilima (kamere, lidari, radari…) nadopunjuju jedni druge i nadoknađuju sve slabosti bilo kojeg korištenog senzora. Iako su robotski sustavi, u koje se ubrajaju i autonomna vozila, vrlo uspješni u prikupljanju podataka o okolini, razumijevanje tih podataka ostaje vjerojatno najteži dio razvoja iznimno pouzdanog autonomnog vozila. Temelj većine robotskih sustava, pa tako i autonomnih vozila, zasniva se na načelu “osjeti – planiraj – djeluj” pa tako vozilo najprije skupom senzorskih sustava kojima je opremljeno, prikuplja podatke o vanjskom svijetu i vlastitoj okolini.
Nakon toga, naprednim algoritmima obrađuje prikupljene podatke, i prema tome izrađuje planove o odlukama koje treba donijeti. Na temelju izrađenog plana djelovanja, plan se pretvara u djelotvorne naredbe za upravljački sustav vozila. Navedene naredbe mogu biti vezane za upravljač, kočnice, tempomat ili sličan sustav, a istodobno se može izvršavati više petlji u “osjeti – planiraj – djeluj” principu. Jedna petlja može pokrenuti ubrzanje ili kočenje u nuždi, dok se druga petlja izvodi rjeđe, a planira i izvršava složenije zadatke, kao što je promjena trake kolnika. Postoje i ekstremno kratke aktivnosti planiranja, poput incidentnih situacija, kada prikupljeni podaci iz senzora ukažu da je prepreka na maloj udaljenosti ispred vozila. U tom trenutku, automatski se mora pokrenuti kočenje u nuždi. U takvim kritičnim situacijama planiranje u petlji iz načela “osjeti – planiraj – djeluj” pretvara se u načelo “osjeti – djeluj”. U ovom slučaju podaci iz senzora izravno pokreću naredbe za djelovanje automobila. Incidentne situacije, poput reakcije na iznenadne pojave pješaka na kolniku, spadaju među najveće izazove koji se pojavljuju ispred autonomnih vozila.
Izvrsna percepcija okoline koju senzori detektiraju i iz nje prikupljaju podatke, uz sofisticirane algoritme umjetne inteligencije koja ih tumači, dopuštaju autonomnim vozilima kvalitetno planiranje i visoku pouzdanost vožnje. Sama ideja razvoja autonomnih vozila temelji se na činjenicama da se takva vozila nikad ne umaraju, kako njihovi algoritmi planiranja mogu izabrati optimalno ponašanje u prometu, i njihovo izvršavanje može biti brzo i besprijekorno, jer im se ni u jednoj situaciji ne povećava vrijeme reagiranja, niti mogu pogriješiti u izvršavanju naredbe kao vozač. Ljudski vid prikuplja sve podatke koje autonomnom vozilu pružaju skupovi senzora. Ljudske kognitivne sposobnosti značajno nadilaze sposobnosti autonomnih vozila. Ljudi također puno bolje tumače i razumijevaju dobivene vizualne informacije. Pa ipak, ljudski vid i percepcija vizualnih informacija mogu biti ograničeni u određenim situacijama, poput nepovoljnih vanjskih uvjeta, umora, neuroloških problema, ili pod utjecajem različitih opijata.
Senzori; lidar, radar, GPS, kamere, računalni vid…
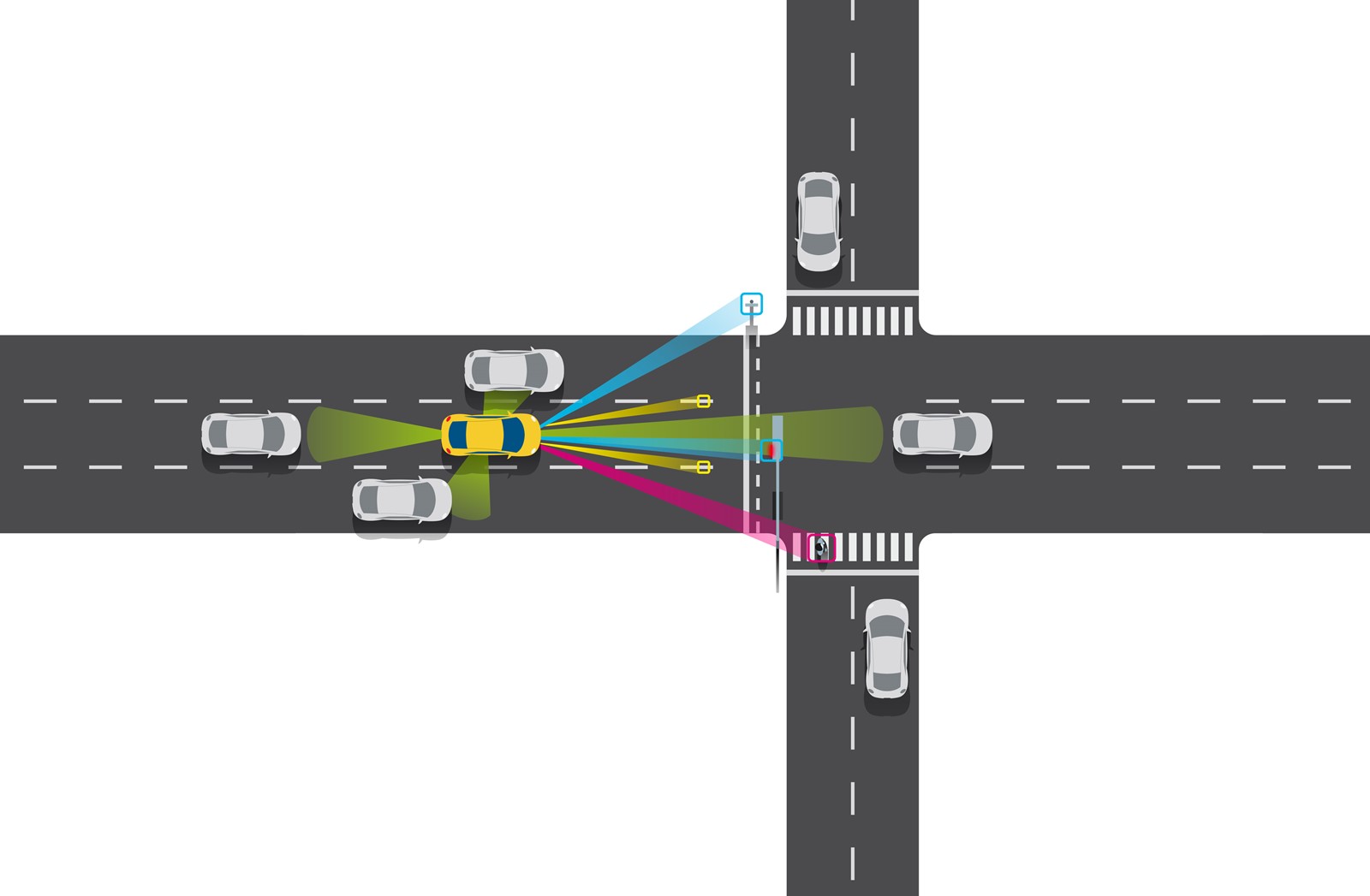
Senzorski sustavi sastoje se od više različitih senzora, koji imaju zadatak prikupljanja podataka iz okoline vozila u stvarnom vremenu. Podaci koje senzori prikupe koriste se za percepciju, planiranje rute, izračunavanje udaljenosti od prepreka, ili za navigaciju. Senzori autonomnih vozila mogu se podijeliti u dvije grupe; na senzore kratkog dometa i senzore srednjeg, odnosno dugog dometa. Senzori kratkog dometa su ultrazvučni senzori, kapacitivni senzori ili infracrveni senzori, a senzori dugog dometa su radar, lidar, računalni vid i GPS.
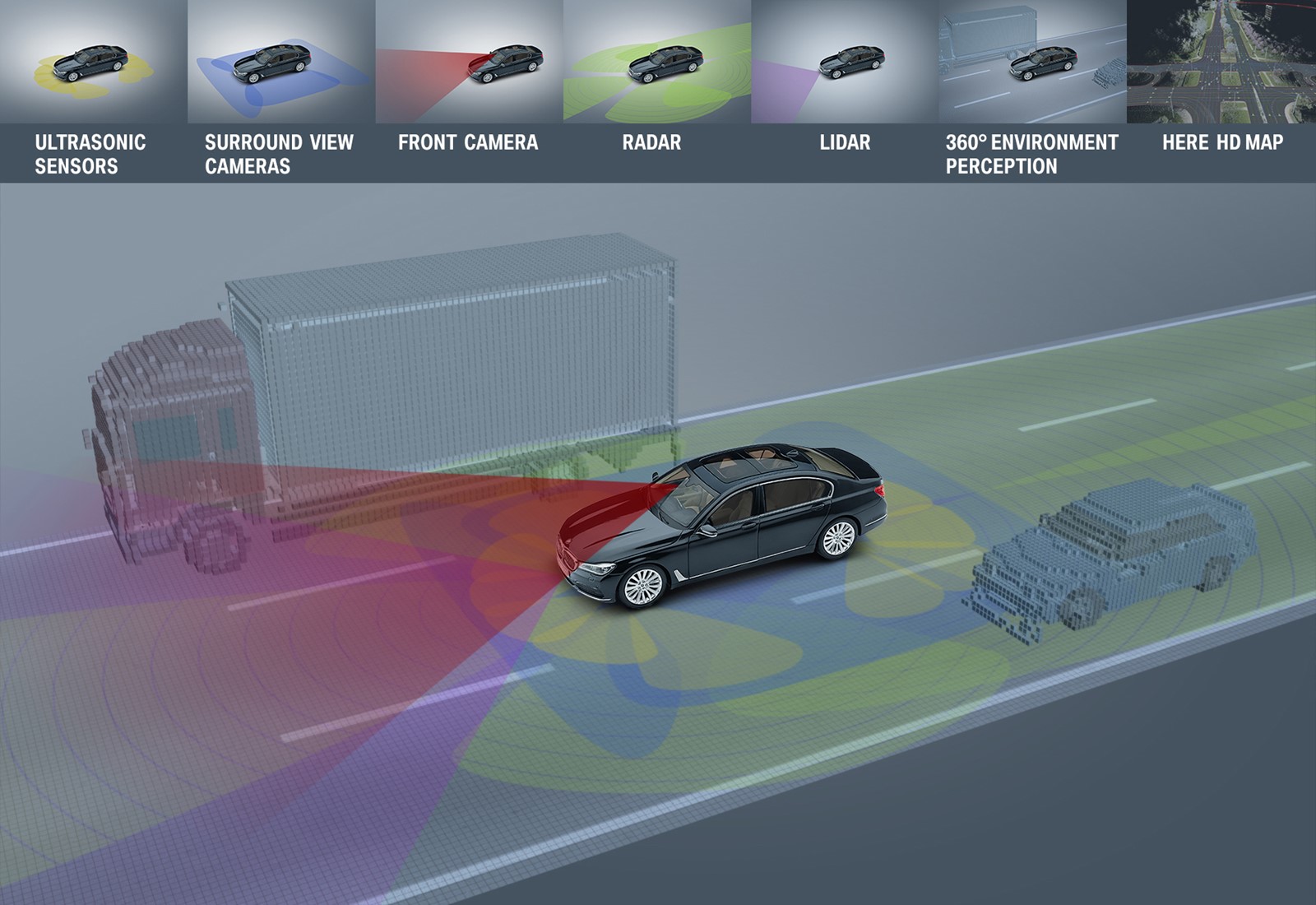
Lidar (engl. Light Detection and Ranging) određuje udaljenost vozila od prepreka pomoću lasera koji emitira svjetlosne zrake, osvjetljava laserskim svjetlom česticu nekog objekta u prostoru, i izračunava vrijeme potrebno da se refleksija vrati od objekta u okolini. Sastoji se od laserskoga uređaja velike preciznosti, koji može precizno očitavati čak i u iznimno nepogodnim vremenskim uvjetima, što kamerama predstavlja veliku prepreku. Prilikom prepoznavanja objekta, lidar kreira detaljnu trodimenzionalnu mapu terena, pomoću koje vozilo može razlikovati različite objekte (kolničke trake, automobile, kamione, bicikle, itd.) i ovisno o tome, pokrenuti plan za reakciju vozila. Nedostatak mu je manja učinkovitost na velikim dometima i loša refleksija na određenim materijalima. Termoplastika, poput polikarbonata, od čega se lidari izrađuju, omogućuje svjetlost i prozirnost slike. Integriranje termoplastike i plastične folije u prednje rešetke, bočne stranice i odbojnike autonomnog vozila, lidare čini neprimjetnima. Plastični materijali za lidare kalibriraju se kako bi omogućili da određene valne duljine radiofrekvencija neometano prolaze kroz njih. Visoka propusnost polikarbonata omogućit će buduću V2V (Vehicle-to-Vehicle) komunikaciju u automobilu i komunikaciju s V2I (Vehicle-to-Infrastructure).
Radar (engl. Radio Detecting and Ranging) koristi frekvencije milimetarskih valova za otkrivanje objekata i prepreka na velikim udaljenostima, kao i za praćenje brzine i smjera različitih sudionika prometa u okolišu autonomnih vozila, poput pješaka, drugih vozila, zaštitnih metalnih ograda, stupića uz kolnik i sličnog. Za svoj rad koristi radiovalove koji dobro percipiraju metalne objekte, dok su objekti od ostalih materijala za njih nevidljivi. U autonomnom su vozilu radari postavljeni tako da prekrivaju prednje područje vozila. Radari šalju ultrakratke elektromagnetske valove, koji se reflektiraju od krute površine (primjerice, stražnjeg dijela vozila iza kojeg se kreće autonomno vozilo). Nakon što radar zaprimi reflektirani signal, on dobije informaciju koliko je objekt (ili prepreka) udaljen od radara, i koliko se brzo kreće, te time dobiva uvid u brzine kretanja drugih vozila koja ga okružuju, u stvarnom vremenu. Radar također snima tijek prometa u dubinu, odnosno percipira kolonu vozila, odnosno sve objekte od kojih se elektromagnetski valovi odbijaju.

Za geolokaciju, odnosno za određivanje vlastitog položaja, autonomna vozila također koriste sustave senzora i za nju je još uvijek ključno korištenje Globalnog sustava pozicioniranja (engl. Global Positioning System – GPS). GPS sustavi autonomnih vozila zaprimaju signale iz orbite satelita koji orbitiraju oko triangulacije njihovih globalnih koordinata. Te su koordinate povezane s mapama cestovnih mreža, kako bi se vozilima omogućilo prepoznavanje njihova položaja na cestama. Osim GPS-a, autonomna vozila koriste i Inercijalni navigacijski sustav (engl. Inertional Navigation System – INS) kako bi se umanjila greška pri lokalizaciji. INS se sastoji od žiroskopa i akcelerometara, koji kontinuirano izračunavaju položaj, orijentaciju i brzinu vozila.
Smanjena vidljivost
Uvjeti smanjene vidljivosti senzorima predstavljaju veliki problem. Smanjena vidljivost može spriječiti funkcioniranje nekog od senzora, i zbog toga je potrebno imati redundantni senzor, otporan na takve uvjete. Takav je primjer lidar, koji može biti neprecizan u uvjetima snijegom zatrpane ceste te ga u takvim situacijama zamjenjuju kamere i radari. Radar i lidar koji se nadopunjuju imaju učinkoviti vid na dužini od oko 50 metara, ali njihova se vidljivost može znatno smanjiti zbog loših vremenskih uvjeta. Isto tako, GPS sustavi u vozilima imaju preciznost od oko 5 metara, ali se u tunelima može dogoditi da znatno promaše svoju lokaciju, ili da u potpunosti zakažu.
U autonomnim vozilima koristi se osam ili više kamera (sedam vanjskih i jedna unutarnja) koje služe za prepoznavanje objekata, praćenje putanje u traci kolnika, svjetlosnih signala i sličnih ulaznih podataka. Kamere samostalno u posebnim vanjskim uvjetima ne funkcioniraju kao ljudsko oko, i bez obzira na napredne algoritme koji obrađuju podatke s kamera, vjerojatno nikad neće moći percipirati vizualne informacije kao ljudsko oko.
Ultrazvučni senzori mogu pružiti precizne podatke kratkoga dometa, a infracrveni senzorski sustavi mogu otkrivati oznake traka bez osvjetljenja, i pješake u noćnim uvjetima. Svaki od spomenutih senzora pruža različite vrste podataka, ali ima vlastita ograničenja, koja se odnose na vidno polje, uvjete okoline i elemente u okruženju koje mogu osjetiti.

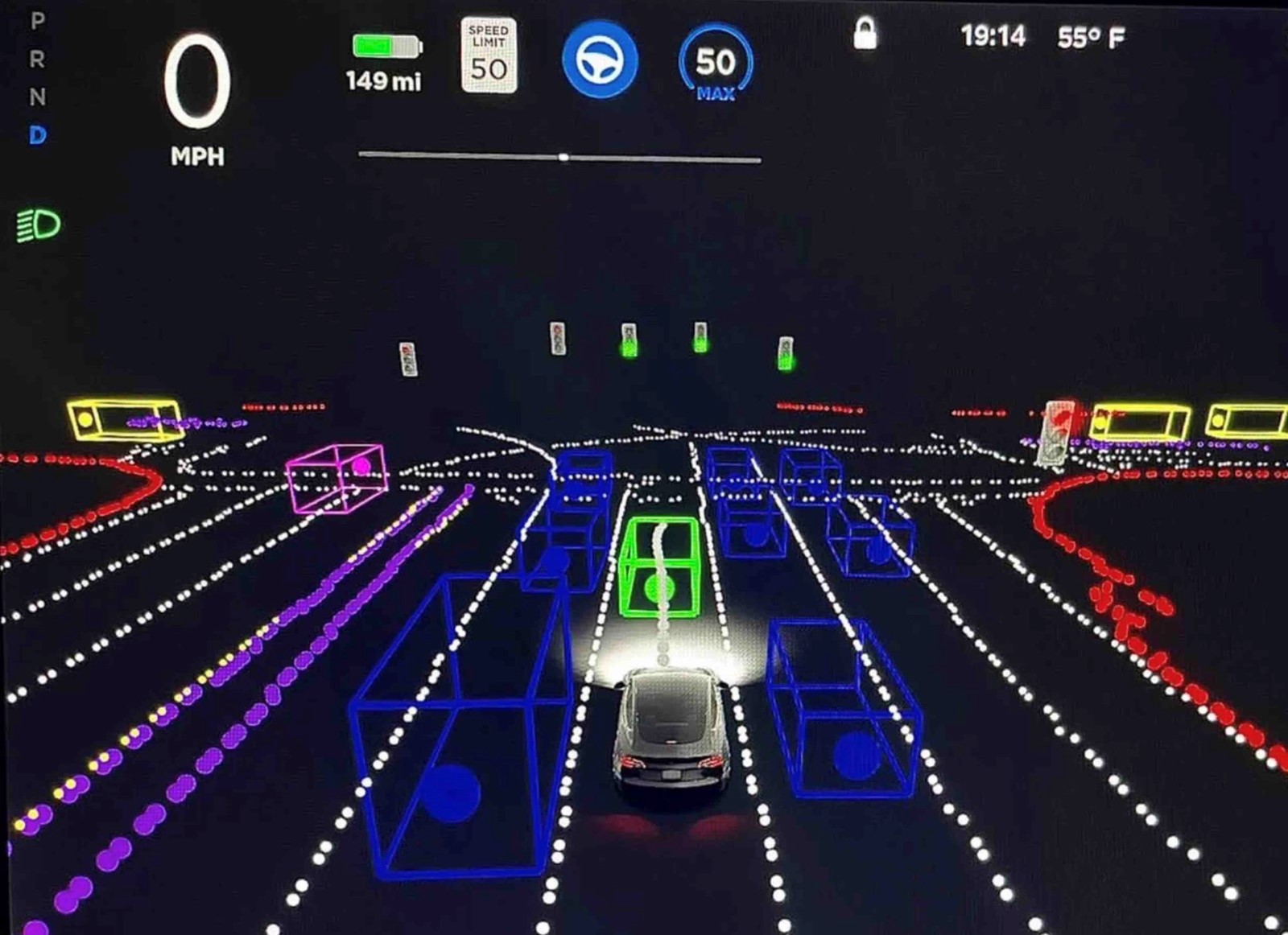
U autonomnim vozilima zadatak računalnog vida (engl. Computer vision) prikupljanje je slika, prepoznavanje i praćenje objekata, detekcija unaprijed zadanih događaja, rekonstrukcija slike i slično, zatim obrada, analiza i razumijevanje dvodimenzionalnih i trodimenzionalnih slika prikupljenih sa senzora vozila. Podaci o slici mogu imati različite oblike, poput videosekvenci ili slika s više kamera. Zadatak računalnog vida izdvajanje je višedimenzionalnih podataka iz stvarnog svijeta, kako bi se proizvele numeričke ili simboličke informacije, koje mogu izazvati odgovarajuće djelovanje te koriste prilikom donošenja odluka. Bez razvijenog računalnog vida, autonomno vozilo ne bi se moglo snalaziti u prostoru, što znači da bi bilo opasno za ljude. Computer Vision, Machine Learning (strojno učenje) i Deep Learning (duboko učenje) općenito su prihvaćeni alati za rješavanje problema percepcije autonomnih vozila. Računalni vid i duboko učenje uvijek imaju istu svrhu, pronalaženje prepreka i traka, procjenu brzina, smjerova i položaja. Tradicionalni algoritmi računalnog vida za otkrivanje kolničkih traka pokazali su se vrlo sporim, a robusnost se ispravljala pomoću Kalmanova filtra. U posljednje vrijeme duboko učenje pomoću konvolucijskih neuronskih mreža nadmašilo je svaku drugu tehniku prilikom otkrivanja linija na kolniku koje dijele prometne trake, kao i pri otkrivanju prepreka na kolniku. Za obradu podataka prikupljenih s kamera, Deep Learning nadmašuje mnoge tehnike poput tradicionalnog računalnog vida i strojnog učenja.
Klijentski, akcijski i korisnički sustavi autonomnih vozila
Klijentski sustav mozak je autonomnog vozila i ima zadaću obraditi sve prikupljene informacije kako bi odlučivao o vožnji. Interpretacija ili percepcija okoline sastoji se od pozicioniranja, detekcije i praćenja objekata u okruženju vozila. Kako bi se sve to realiziralo, mora se napraviti spoj ili “fuzija” podataka primljenih od različitih senzora. Algoritmi koji rade na niskoj, srednjoj i visokoj razini, spajaju prikupljene podatke. Tek na srednjoj razini dolazi do glavne fuzije senzorskih podataka, a na visokoj se razini razmatraju različite donesene odluke, bazirane na podacima pojedinog senzora, i na temelju njih stvara se konačna odluka koja se šalje akcijskom sustavu da pokrene reakciju.
Akcijski sustavi su mehanički dijelovi autonomnoga vozila (kočnice, upravljač, pogonski sustavi), koji izvode naredbe zaprimljene od klijentskoga sustava te usmjeravaju autonomno vozilo.
Korisnički su sustavi kombinacija hardvera i softvera koji omogućuju korisniku autonomnoga vozila da u realnom vremenu s njim komunicira. Interakcijom s korisničkim sustavom, putnik može dobivati informacije o performansama vožnje te može od autonomnog vozila zatražiti da obavlja određene zadatke unoseći svoje zahtjeve. Korisnički sustav sastoji se od pokazivača koji korisniku vozila pružaju informaciju o ruti kojom se kreću, ili sljedećim radnjama koje namjerava izvršiti. Putnici dobivaju informacije o okolini autonomnoga vozila te informacije vezane za uvjete unutar vozila, kako bi se korisnik osjećao ugodnije. Moderni koncepti korisničkog sustava autonomnoga vozila namjeravaju ukloniti standardne elemente kao što su volan, pedale i mjenjač, zamijeniti ih jednim velikim ekranom, koji će pokazivati informacije o okolini te korisniku će dopuštati samo da ga pokrene, zaustavi i unese željenu rutu.
Kako komuniciraju autonomna vozila
Kako bi autonomna vozila bila funkcionalna, potrebno je da komuniciraju s okolinom i između sebe. U tom smislu potrebna je komunikacija između vozila i infrastrukture (engl. Vehicle to Infrastructure, V2I) i komunikacija vozila s vozilima (engl. Vehicle to Vehicle, V2V). Također, u posljednje vrijeme i komunikacija između vozila i svega što ih okružuje (engl. Vehicle to Everything, V2X) postaje sve značajna.

V2I je prijeko je potrebna za upravljanje prometom i koordinaciju autonomnih vozila. Nadzorni sustavi postavljeni na infrastrukturi moraju prikupljati globalne i lokalne podatke o stanju u prometu, uvjetima na kolniku i slične podatke. Nakon što se ti podaci analiziraju u realnom vremenu (u nadzornom centru za upravljanje prometom ili u cloudu), koriste se u bazičnim modelima protoka prometa te se određene radnje primjenjuju na određenoj grupi vozila. Takva interakcija između vozila i infrastrukture značajno će promijeniti koncept prometa. Informacije prikupljene iz prometne infrastrukture izravno će se pomoću bežičnih komunikacijskih sustava kratkoga dometa prenijeti sustavu kontrole u autonomnom vozilu, kako bi ono optimiziralo brzinu vožnje, razmak između vozila, odnosno ubrzalo ili usporilo vožnju, i slično.
V2V komunikacija omogućuje interakciju vozila s vozilima bez intervencije nadzornog centra za upravljanje prometom, clouda ili nekog trećeg entiteta. Autonomna vozila, omogućujući koordinaciju njihovih procesa odlučivanja, lokalno razmjenjuju informacije kako bi se postigao efekt glatkog protoka prometa. Kod V2V komunikacije, vozila su istodobno i nadzorni elementi prometa te vozila u suradnji decentralizirano donose odluke (primjerice, o redoslijedu prelaska raskrižja). U budućnosti će se upravljanje prometom organizirati na podacima koji se prikupljaju iz V2V, V2I i V2X. Zbog toga je važno da proizvođači vozila i komunikacijskih uređaja razvijaju standardizirane uređaje, kako bi se postigla najbolja moguća interakcija.

U EU je za isključivo sigurnosne ITS aplikacije određen frekvencijski pojas od 5.875 do 5.905 MHz. Također, predložena je bežična komunikacijska tehnologija kratkog dometa, takozvani ITS-G5 (evolucija standarda 802.11. ITS-G5 koristi ad hoc mrežnu topologiju bez fiksne strukture, što znači da svi opremljeni agenti, poput vozila, motocikala i pješaka, mogu izravno međusobno komunicirati, bez razmjene podataka kroz pristupnu točku ili baznu stanicu). Takva mrežna arhitektura ne poznaje superiorni entitet koji bi upravljao preopterećenjima. Također, u EU se radi na provedbi decentralizirane kontrole zagušenja komunikacija, takozvanoj DCC mreži. DCC je zajednički naziv za različite tehnike kojima se pokušava izbjeći preopterećenje mrežnog kanala. 5G mobilne mreže mogle bi podržavati dodatne usluge, istodobno održavajući kvalitetu i sigurnost V2X komunikacije.
U Sjedinjenim Američkim Državama najviše su se orijentirali prema namjenskoj komunikaciji kratkog dometa (engl. Dedicated Short-Range Communication, DSRC). Radi se o dvosmjernoj bežičnoj komunikacijskoj tehnologiji kratkog do srednjeg dometa, zasnovanoj na IEEE 802.11p standardu, zatim američkom protokolu Wireless Access in Vehicular Environment, i TC-ITS europskom standardu. U SAD-u je dodijeljen frekvencijski pojas 75 MHz u spektru od 5.9 GHz, koji će se koristiti za ITS u svrhu sigurnosti vozila i aplikacija za mobilnost.
Dvojbe oko autonomnih vozila
U svijetu je dosad napravljen velik broj istraživanja glede autonomnih vozila. Posljednji zaključci pokazuju kako ljudi još uvijek nisu dovoljno upoznati s konceptom autonomne tehnologije i samim pojmom autonomnih vozila, te da tržište još uvijek ne prihvaća upotrebu takvih vozila. Ispitanici provedenih anketa u najvećoj su mjeri zabrinuti za posljedice vezane uz kvar sustava ili kvar opreme, zatim uz vožnju u potpuno autonomnom vozilu koje nema kontrole za vozača, kao i za sve vrste prijevoza koje bi funkcionirale bez vozača (taksi, javni prijevoz, prijevoz tereta). Većina je ispitanika izjavila kako ne bi posjedovala potpuno autonomno vozilo, ako je to moguće. Gotovo sva ispitivanja javnog mnijenja ukazuju na to da su ljudi vrlo zabrinuti zbog moguće pravne odgovornosti vlasnika vozila, zbog straha od hakerskih napada, zbog interakcije s drugim vozilima koja nisu autonomna, privatnosti podataka (bilježenje lokacija i praćenje) te zbog performansi autonomnih vozila u lošim vremenskim uvjetima.
| SAE stupanj autonomnosti | Razina autonomije vozila | Opis |
|---|---|---|
| L0 | Bez ikakve autonomije | Ne postoji nikakva automatizacija u vožnji. Većina vozila diljem svijeta danas je bez ikakve autonomije. ABS, ECS, kočenje u slučaju nužde, uphill assist i slične tehnologije spadaju u L0 razinu. Vozila s navedenim tehnologijama nisu svjesna svoje okoline, već reagiraju na jednostavne podatke iz automobilskih senzora. Čitavu vožnju vozač ručno kontrolira, iako navedene tehnologije pomažu sigurnosti i ugodnosti vožnje. |
| L1 | Najniža razina autonomnosti | L1 najniža je razina automatizacije upravljanja vozila, gdje vozilo tek pomaže vozaču u upravljanju. L1 vozila sastoje se od dva dijela: logičke funkcionalnosti i fizičkog dijela vozila (primjerice, karoserija, šasija...). Kad je riječ o digitalnim tehnologijama, na fizički dio vozila nadovezuje se logička funkcionalnost u obliku operativnih sustava koji pomažu upravljanju samim vozilom i njihovoj samostalnosti. Logička sposobnost pruža kontrolu nad vozilom i povezuje ga s ostalim dijelovima vozila. Logički dio sadrži funkcionalnosti koje ponekad mogu preuzeti ili oduzeti vozaču upravljanje automobilom, a adaptivna kontrola brzine pomaže održavati adekvatan razmak s vozilom ispred sebe, ali vozač i dalje upravlja vozilom i nadgleda okolinu. |
| L2 | Djelomična automatizacija vožnje | Uz fizički dio vozila dolazi mrežni sloj. Taj se sloj također sastoji od dva različita dijela: fizički prijenos i logički prijenos. Fizički transportni sloj odnosi se na radare, senzore i kabele autonomnih vozila, koji omogućuju prijenos digitalnih informacija. Uz to, mrežni sloj autonomnih vozila također ima logički prijenos, koji sadrži komunikacijske protokole i mrežni standard za komunikaciju digitalnih podataka s drugim mrežama i platformama, ili između slojeva. To povećava pristup L2 vozilu. Djelomična automatizacija vožnje predstavlja, uz L1 funkcionalnost, dodatnih do 25 pojedinačnih funkcija koje povećavaju sigurnost, udobnost i učinkovitost vožnje (poput pomoći pri upravljanju i zadržavanju traka, usporavanju i ubrzavanju, kako bi se osigurao sigurnosni razmak između vozila, pomoć pri gužvi u prometu i raspoznavanje semafora). Vozač u svakom trenutku može preuzeti kontrolu nad vožnjom. Teslin Autopilot, General Motorsov Super Cruise i G20 BMW 3 primjeri su L2 vozila. |
| L3 | Uvjetna automatizacija | Kod L3 razine automatski sustavi svjesni su okoline u kojoj se automobil nalazi, poput prometnica, drugih vozila i objekata, na i u neposrednoj blizini, prometnice. Za vozača su L2 i L3 slični, ali s tehnološke strane, radi se o višestruko složenijem sustavu. L3 vozilo u stanju je, uz sve karakteristike L2 kategorije, preuzeti kontrolu i preteći i zaobići vozilo koje se kreće usporeno. Vozač u svakom trenutku može preuzeti kontrolu. Prvi komercijalno dostupni automobil s L3 razinom automatizacije je Audi A8L, i samo europska verzija tog automobila ima omogućenu L3 razinu automatizacije, dok je ona za američko tržište zbog regulatornih razloga spuštena na L2 razinu. |
| L4 | Visoka razina autonomnosti | Vozila L4 razine autonomnosti predstavljaju početak prave autonomije vozila. L4 vozila koriste aplikacije koje pomažu vozilu (i vozaču) ekstrahirati, kreirati, pohraniti i konzumirati sadržaj, s obzirom na pohranjenu povijest vožnje vozila, prometne gužve, odabir rute vožnje ili načina parkiranja. Sustav u vozilu sposoban je samostalno voziti, prepoznati situaciju u okolini i odlučivati u različitim prometnim situacijama (iznenadna pojava pješaka na kolniku, oduzimanje prednosti prolaza od drugog vozila), ili ako otkaže neki od sustava u samom automobilu. L4 vozila i dalje imaju ugrađene ručne komande, i vozač može preuzeti kontrolu nad vožnjom u bilo kojem trenutku. U praksi L4 vozila još se uvijek konzervativno koriste za usluge komercijalnog prijevoza na kratkim rutama i unutar poznate i zadane zone (primjerice, hotel – aerodrom). Tamo gdje im je prometovanje dozvoljeno, osim ograničenja na područje, obično im je ograničena i maksimalna brzina (40-50 km/h). Trenutačno u svijetu nekoliko tvrtki ima u ponudi takva vozila: francuska tvrtka NAVYA, koja koristi mini autobuse i električne taksije u SAD-u, Alphabetov Waymo (koji je i vodeći u svijetu u toj tehnologiji), čiji su taksiji u Arizoni prošli u godinu dana preko 15 milijuna kilometara; te Volvo koji za Baidu proizvodi L4 taksi za potrebe kineskog tržišta. |
| L5 | Potpuna autonomija | L5 potpuno su autonomna vozila, gdje je vozilo sposobno posve samo obavljati sve funkcije, bez ikakva sudjelovanja vozača, odnosno, takvo vozilo nema potrebe ni za vozačem niti ima pričuvne ručne kontrole. Takvi automobili, koji su u stanju sami prijeći od bilo koje točke do bilo koje druge zadane točke, u različitim vremenski uvjetima, danju i noću, neovisno o stanju prometa, testiraju se diljem svijeta, ali ne postoje u serijskoj ili maloserijskoj proizvodnji, niti ih je moguće kupiti. Ovisno o tome koga pitate, L5 razinu dočekat ćemo u komercijalnoj primjeni najranije za pet godina, a vjerojatno i kasnije. |