Robotika - Kobot vs Robot
Kolaborativni roboti ili koboti, samo su jedna od nekoliko vrsta robota. Njihovo je osnovno obilježje sigurna i učinkovita suradnja s ljudskim radnicima (Human-Robot Collaboration, HRC) dok obavljaju jednostavne industrijske zadatke. Suradnja čovjeka i robota revolucionira industrijsku proizvodnju, a također igra važnu ulogu u drugim sektorima, poput sektora medicinske tehnologije.
Kobot se promovira kao alat koji svakom treba, poput osobnog računala. Postoji više podjela robota, ovisno o tome u koji izvor zavirite. Prema Međunarodnoj federaciji robotike (engl. International Federation of Robotics, IFR) osnovane davne 1987. godine, roboti se dijele na mobilne, industrijske ili manipulativne robote, servisne, obrazovne ili interaktivne robote, modularne i kolaborativne robote. Općenito, IFR definira četiri razine suradnje između industrijskih robota i ljudskih radnika. Prva razina su roboti i ljudski zaposlenici u međusobnoj suradnji. Čovjek i robot rade jedan pored drugog bez ograde, ali i bez zajedničkog radnog prostora. Kod sekvencijalne suradnje čovjek i robot aktivni su u zajedničkom radnom prostoru, ali su njihovi pokreti sekvencijalni, odnosno ne rade istodobno. U suradnji, robot i čovjek istodobno rade na istom poslu, a prilikom odgovarajuće suradnje, robot u stvarnom vremenu reagira na kretanje ljudskog radnika.
Dok se konvencionalni roboti često smatraju sredstvom za zamjenu ljudskih radnika, koboti su zapravo osmišljeni da (doslovno) pruže pametnu i učinkovitu ruku pomoći radnicima u proizvodnji. Također, koboti su dizajnirani da njima intuitivno upravljaju zaposlenici različitih razina vještina. Koboti poboljšavaju ljudske sposobnosti u obavljanju zadataka koji zahtijevaju preciznost i izdržljivost, što može smanjiti ozljede i umor koji ometaju ljudske zaposlenike kad obavljaju zamorne i ponavljajuće zadatke. Zamislite da čitav radni vijek provedete spajajući metalnu kanilu na plastičnu špricu, ili da u stakleniku presađujete salatu. Koboti su razvijeni da rade zajedno s ljudima, a ne da im preuzimaju poslove. Dok se koboti mogu uhvatiti ukoštac s nesigurnim, prljavim ili monotonim poslovima, ljudi mogu raditi na lakšim i ugodnijim zadacima.



Mobilni roboti
Mobilni roboti imaju sposobnost kretanja u svojem okruženju i nisu fiksirani na jednoj fizičkoj lokaciji. Primjer mobilnog robota koji je danas čest u uporabi u tvornicama je automatizirano ili automatski vođeno vozilo (Automated Guided Vehicle ili Automatic Guided Vehicle, AGV). AGV je mobilni robot koji prati markere ili žice na podu, ili koristi vid ili lasere. Mobilni roboti se također primjenjuju u industriji, vojsci i sigurnosnim okruženjima. Također, pojavljuju se kao potrošački proizvodi, za zabavu ili obavljanje određenih zadataka, poput usisavanja, iako se robotski usisivači češće smještaju u grupu servisnih robota. Mobilni roboti u velikom su fokusu trenutačnih istraživanja, i gotovo svako veće sveučilište ima jedan ili više laboratorija koji se usredotočuju na istraživanje mobilnih robota.
Mobilni roboti obično se koriste u strogo kontroliranim okruženjima, kao što su proizvodne trake, jer imaju poteškoća s reagiranjem na neočekivane smetnje. Zbog toga većina ljudi rijetko susreće robote. Međutim, mobilni kućni roboti za čišćenje, kao i samohodne kosilice za travu, sve su češći roboti u brojnim dobrostojećim kućanstvima.
Industrijski roboti
Industrijski roboti koje većina ljudi nije imala priliku vidjeti obično se sastoje od zglobne ruke (višestruki manipulator) i krajnjeg efektora, koji je pričvršćen na fiksnu površinu. Jedan od najčešćih tipova krajnjeg efektora je sklop hvataljke. Međunarodna organizacija za standardizaciju (International Organization for Standardization, ISO) definira manipulirajuće industrijske robote standardom ISO 8373. Prema njihovoj definiciji, industrijski robot je "automatski kontrolirani, reprogramabilni, višenamjenski manipulator, koji se može programirati u tri ili više osi, koji može biti fiksiran na mjestu ili mobilan za upotrebu u automatiziranoj industriji".
Tu definiciju koriste Međunarodna federacija robotike (International Federation of Robotics, IFR), Europska istraživačka mreža robotike (European Robotics Research Network, EURON) i mnogi nacionalni odbori za norme. Industrijski roboti mogu se klasificirati i prema mehaničkoj strukturi. Tako razlikujemo kartezijanski robot, čija ruka ima tri prizmatična zgloba, i čije su osi u korelaciji s kartezijskim koordinatnim sustavom, zatim SCARA robot, koji ima dva paralelna rotacijska zgloba za osiguravanje usklađenosti u ravnini, zglobni robot, čija ruka ima najmanje tri rotacijska zgloba, paralelni ili delta robot, čije ruke imaju paralelne prizmatične ili rotacijske zglobove, i cilindrični robot, čije osi tvore cilindrični koordinatni sustav.
Servisni ili uslužni roboti
Servisni ili uslužni roboti najčešće su industrijski roboti fiksne robotske ruke, i manipulatori koji se koriste prije svega za proizvodnju i distribuciju robe. Oko pojma "uslužni robot" čini se da postoje manji prijepori te je Međunarodna federacija robotike (IFR) predložila provizornu definiciju: "Uslužni robot je robot koji radi polu ili potpuno autonomno pri obavljanju usluga korisnih za dobrobit ljudi i opreme, isključujući proizvodne operacije".
Primjeri servisnih robota su robotski usisivač i barista bot koji priprema kavu. Servisni roboti pomažu ljudskim bićima, obično obavljajući prljav, dosadan, udaljeni ili ponavljajući posao. Obično su autonomni, a njima upravlja ugrađeni kontrolni sustav s opcijama ručnog nadjačavanja.
Obrazovni roboti
Iako roboti ni na koji način nisu zamjena za nastavnike, napredak u umjetnoj inteligenciji i interaktivnoj tehnologiji učinio je robote prikladnima za određene uloge u učionici i izvan nje. Roboti su napravili velike korake u obrazovnoj industriji, njegujući dječje socijalne vještine, personalizirajući nastavu interakcijom "jedan na jedan" i preuzimajući druge uloge kako bi ublažili ogromno radno opterećenje učitelja. Od podučavanja stranih jezika, do podučavanja učenika, kod robota s visokim stupnjem autonomije robotika u obrazovanju spremna je uključiti se u nastavu najmlađih generacija. Roboti se koriste i kao obrazovni asistenti učiteljima, a postoje i roboti koji pomažu manjoj djeci u učenju matematike, fizike i nekoliko drugih predmeta.
Kako bi djeci bili dopadljivi, obrazovni roboti najčešće dizajnom imitiraju ljudski izgled i opremljeni su očima, ustima i ljudskim crtama lica. Ti roboti također koriste tehnologiju koja im omogućuje analizu govora i reakcija lica, tako da mogu odrediti odgovarajući odgovor. S naglaskom na emocionalni razvoj, roboti pomažu mlađoj djeci da nauče kako percipirati tuđe emocije i odgovoriti na njih. Manjak nastavnika u budućnosti se namjerava nadomjestiti robotima koji će biti sposobni raditi s grupom učenika i pomagati djeci kojoj je potrebno više pažnje.

Modularni robot
Modularni roboti nova su vrsta robota, koji su dizajnirani da povećaju upotrebu robota modularnošću njihove arhitekture. Funkcionalnost i učinkovitost modularnog robota lakše je povećati u usporedbi s konvencionalnim robotima. Ti se roboti sastoje od jedne vrste identičnih, nekoliko vrsta različitih identičnih modula, ili modula sličnog oblika, koji se razlikuju prema veličini. Njihova arhitektonska struktura omogućuje višestruku redundanciju za modularne robote, s obzirom na to da se mogu dizajnirati s više od osam stupnjeva slobode (Degrees of Freedom, DOF). Programiranje, inverzna kinematika i dinamika za modularne robote složenija je nego kod tradicionalnih robota.
Modularni roboti mogu biti sastavljeni od modula u obliku slova L, kubičnih modula te modula u obliku slova U i H. ANAT, rana modularna robotska tehnologija omogućuje stvaranje modularnih robota iz modula u obliku slova U i H koji se povezuju u lanac, a koriste se za formiranje heterogenih i homogenih modularnih robotskih sustava. Ti ANAT roboti mogu se dizajnirati s "n" brojem DOF-ova jer je svaki modul potpuni motorizirani robotski sustav koji se sklapa na module povezane prije i poslije njega u svom lancu, te stoga jedan modul dopušta jedan stupanj slobode. Što je više međusobno povezanih modula, to će imati više stupnjeva slobode. Moduli u obliku slova L također se mogu dizajnirati u lanac, i moraju postajati sve manji kako se veličina lanca povećava, jer nosivost pričvršćena na kraj lanca stvara veći pritisak na module koji su dalje od baze.
ANAT moduli u obliku slova H ne pate od tog problema, zato što njihov dizajn omogućuje modularnom robotu da ravnomjerno raspoređuje pritisak i udarce među drugim pričvršćenim modulima, pa se stoga kapacitet nosivosti ne smanjuje povećanjem duljine ruke. Modularni roboti mogu se ručno ili sami rekonfigurirati, kako bi formirali drugi robot koji može obavljati različite funkcije. Budući da su modularni roboti iste vrste arhitekture sastavljeni od modula koji sačinjavaju različite modularne robote, robot sa zmijskom rukom može se kombinirati s drugim robotom u dvostruki ili četveroruki robot. Isto tako, robot sa zmijskom rukom može se podijeliti u nekoliko mobilnih robota, a mobilni roboti mogu se razdvojiti i u više manjih, ili kombinirati s drugima u veći ili drugačiji. To omogućuje jednom modularnom robotu mogućnost da bude potpuno specijaliziran za jedan zadatak, kao i sposobnost da bude specijaliziran za obavljanje više različitih zadataka.
Modularna robotska tehnologija trenutačno se primjenjuje u hibridnom transportu, industrijskoj automatizaciji, čišćenju kanala i rukovanju. Mnogi istraživački centri i sveučilišta također proučavaju tu tehnologiju i razvijaju vlastite prototipe.

Koboti ili kolaborativni roboti
Industrijski roboti u tvornicama zbog svoje snage i robusnosti uglavnom su smješteni iza ograda, kako im zaposlenici ne bi mogli prići i ozlijediti se. Za razliku od njih, koboti su nova generacija robota, koji su slobodni i nesputani bilo kojom vrstom ograde, čime nadilaze granice i ograničenja radnog prostora koji su sprečavali njihove pretke (tradicionalne industrijske robote) da žive i rade rame uz rame sa svojim ljudskim kolegama. Opremljeni senzorima i vrlo osjetljivi na otkrivanje bilo koje neočekivane situacije, koboti imaju mogućnost odmah se zaustaviti kada se nađu na putu ljudskom radniku, ili ih iznenadi neki objekt koji se nađe na mjestu na kojem ga kobot ne očekuje. U usporedbi sa standardnim industrijskim robotima, to ih čini pouzdanim radnim kolegama, kada je riječ o sigurnosti na radnom mjestu. Pa ipak, sposobnost kobota da radi s ljudskim radnicima nije osnovna razlika kobota i tradicionalnog industrijskog robota.
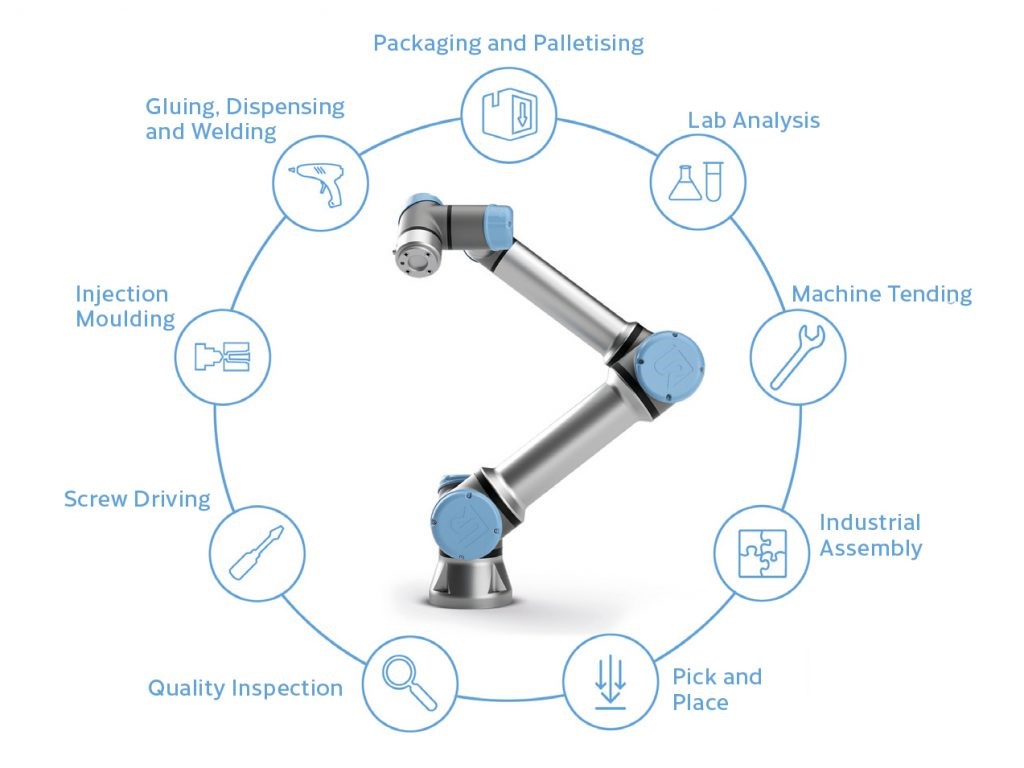
Kobot, ili kolaborativni robot, namijenjen je za izravnu interakciju čovjeka i robota unutar zajedničkog prostora, ili tamo gdje su ljudi i roboti u neposrednoj blizini. Koboti se izrađuju od laganijih konstrukcijskih materijala, zaobljenih rubova i inherentnih ograničenja brzine i sile. Opremljeni su senzorima i softverom koji ljudima u njihovoj blizini osiguravaju siguran rad. Postoje mnogobrojne uloge kobota, pa se tako koriste za sastavljanje, doziranje, završnu obradu, održavanje stroja, rukovanje materijalima, zavarivanje, uklanjanje materijala, kontrolu kvalitete i još mnogo toga. IFR razlikuje dvije glavne skupine robota –industrijske robote koji se koriste u automatizaciji u industrijskom okruženju i servisne robote za kućnu i profesionalnu upotrebu. Uslužni roboti mogli bi se smatrati kobotima jer su namijenjeni za rad zajedno s ljudima.
Koboti mogu imati mnoge namjene, od informacijskih robota u javnim prostorima (primjer uslužnih robota), logističkih robota koji transportiraju materijale unutar zgrade, do industrijskih robota koji pomažu automatizirati neergonomske zadatke, kao što je pomaganje ljudima pri pomicanju teških objekata, ili operacije strojnog dodavanja ili sastavljanja.
U većini današnjih industrijskih primjena kobota, kobot i ljudski radnik dijele isti prostor, ali izvršavaju zadatke neovisno ili uzastopno (koegzistencija ili sekvencijalna suradnja). Suradnja ili responzivna suradnja trenutačno su manje uobičajeni.
Razlike kobota i robota
Budući da koboti ne zahtijevaju nikakvo kućište i prilično su jednostavni za postavljanje i programiranje, mogu se fleksibilno premještati s jednog mjesta na drugo. Tradicionalni industrijski roboti zahtijevaju fiksnu instalaciju na podlozi, što je zapravo njihovo ograničenje zbog otežanog premještanja unutar neke proizvodne hale. Koboti su i znatno prilagodljiviji od industrijskih robota. Fleksibilnost kobota omogućuje čestu izmjenu zadataka koji se pred njih postavljaju, dok su zadaci koje obavljaju tradicionalni industrijski roboti obično ponavljajući, s vrlo rijetkim promjenama. Dok se tradicionalni industrijski roboti moraju programirati on-line ili off-line, koboti ne zahtijevaju programiranje, i radnici im mogu davati online upute bez ikakva formalnog programiranja. Prenamjena tradicionalnog industrijskog robota kako bi preuzeo novi zadatak, zahtijeva vještine i znanje programiranja. Za razliku od toga, većina kobota može "naučiti" nove zadatke, uz jednostavne upute napravljene pomicanjem kobota u željenoj putanji kretanja i snimanjem kretanja u sekvencama.
Glavna karakteristika kobota, prema kojoj je i najpoznatiji, jest njegova sposobnost rada rame uz rame s radnicima. Tradicionalni industrijski roboti nemaju tu sposobnost, osim ako nisu programirani za tu svrhu. Većina tradicionalnih industrijskih robota nema sposobnost sigurne interakcije s radnicima bez ugradnje dodatnih senzora i detektora pokreta. Većina kobota ima unutarnje senzore koji ih prisiljavaju da odmah stanu kada naiđu na neočekivane objekte, što im omogućuje sigurnu interakciju s ljudima.
Nabava i instaliranje tradicionalnog industrijskog robota najčešće predstavlja skupo ulaganje, koje je opravdano samo ako tvrtka proizvodi srednje i velike serije proizvoda. Relativno niske cijene kobota omogućuju profitabilnost čak malim poduzećima, s manjim količinama proizvodnje.
Trenutačno dostupni koboti veličinom su mali i osjetno sporiji od tradicionalnih, industrijskih robota. Njihova sposobnost da dijele isti radni prostor s ljudima ograničava njihovu brzinu kretanja i masu koju smiju prenositi. Tradicionalni industrijski roboti nemaju ta ograničenja, zbog čega mogu raditi puno većom brzinom, i nositi puno veće terete.
Tradicionalni industrijski roboti obično se nabavljaju sa svrhom da obavljaju točno određene zadatke te su posebno dizajnirani i programirani za obavljanje tog zadatka. Stoga je najčešće vrlo skupo i teško opravdati redizajn cijele proizvodne linije, kako bi se omogućila neka nova funkcionalnost. Budući da se koboti mogu fleksibilno premjestiti i instalirati, njihova uporaba za nove aplikacije lako se može opravdati.
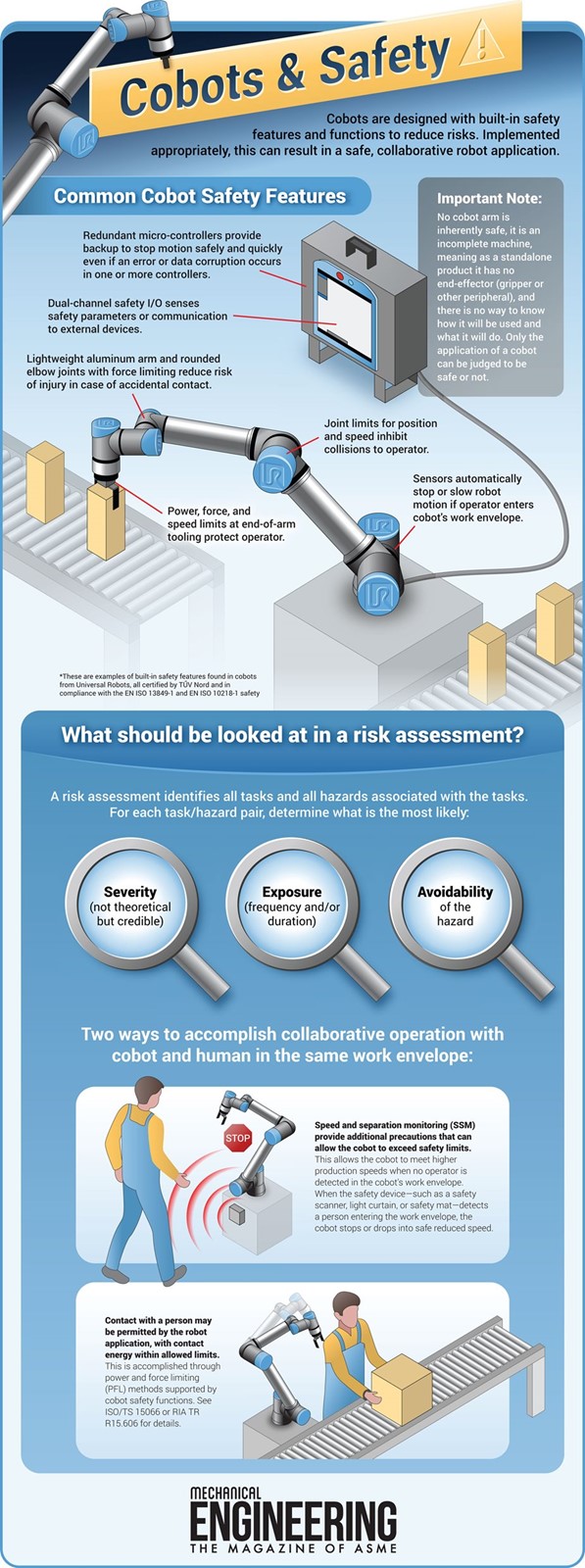
Budući da koboti dijele isti radni prostor s ljudskim radnicima, procjena rizika važan je element koji treba uzeti u obzir pri projektiranju radnih sustava s interakcijama između čovjeka i kobota. Važno je pridržavati se sigurnosnih standarda, kao što je ISO TS 15066. Ista dubinska procjena rizika nije potrebna za tradicionalne industrijske robote.
Tradicionalni industrijski roboti obično imaju šest osi, s posljednje tri osi koje se sijeku u zapešću, dok koboti obično imaju šest i sedam osi, s mnogo pomaka.
Korist od kobota
Najvažnija korist uvođenja kobota u radne procese je povećanje učinkovitosti. Kada se radi s robotima, ljudski zaposlenici u tvornicama obično utovaruju dijelove koji će se oblikovati, učvršćivati ili nešto treće, na pokretnu traku ili okretnu ploču. Zatim zaposlenik napušta radni prostor, a robot obavlja svoj posao. S kolaborativnim robotima, operater može neki dio izravno dodati robotu, i nikada ne mora napuštati radni prostor, što smanjuje utrošak vremena i prostora. U studiji koju su proveli istraživači MIT-a u tvornici BMW-a, timovi sastavljeni od ljudi i robota koji zajedno rade pokazali su se produktivnijim od timova sastavljenih od samih ljudi ili samih robota. Odnosno, vrijeme ljudskog mirovanja smanjeno je 85% kada je postojala suradnja s robotom. Je li to dobra vijest za ljudske zaposlenike, pokazat će vrijeme.
Stereotip je da su roboti korisni samo za velike industrijske pogone. Međutim, to jednostavno više nije slučaj otkad su se pojavili koboti. Manje tvrtke mogu imati koristi od kobota u različitim industrijskim primjenama, kao što su montaža, utovar/istovar, pakiranje, sortiranje, doziranje, brušenje i poliranje. Primjer su baristi botovi, zapravo koboti koji pripremaju kavu na aparatima u kafićima. Konobari ih pripremljene i posložene na pladnjeve raznose do stolova i poslužuju gostima.
Uz današnju tehnologiju, veliki broj djelatnosti vidi povrat ulaganja (ROI) u manje od godinu dana, kada ulože u kobote. Dolazi do povećanja produktivnosti i smanjenja troškova rada, a istodobno je ta vrhunska tehnologija uzbudljiva i vrlo privlačna mnogim kupcima.
Prednosti ugradnje robota bez sigurnosnih kaveza, beskonačne su. Upravo ta fleksibilnost kobote čini privlačnima za postavljanje u mnoge proizvodne procese koji se sastoje od mješovitih aktivnosti. Primjerice, kobot koji s ljudima radi u staklenicima nevjerojatno je fleksibilan i učinkovit u obavljanju rutinskih dosadnih poslova koji ljude vrlo iscrpljuju.
Još jedna velika korist od kobota je u njihovoj primjeni za obavljanje kompliciranih i opasnih zadataka koje tradicionalni roboti ili ljudi jednostavno ne mogu obavljati. Primjer bi mogao biti kobot u operacijskoj sali ili laboratoriju, gdje je potrebna "sigurna ruka" u često nesigurnom okruženju.
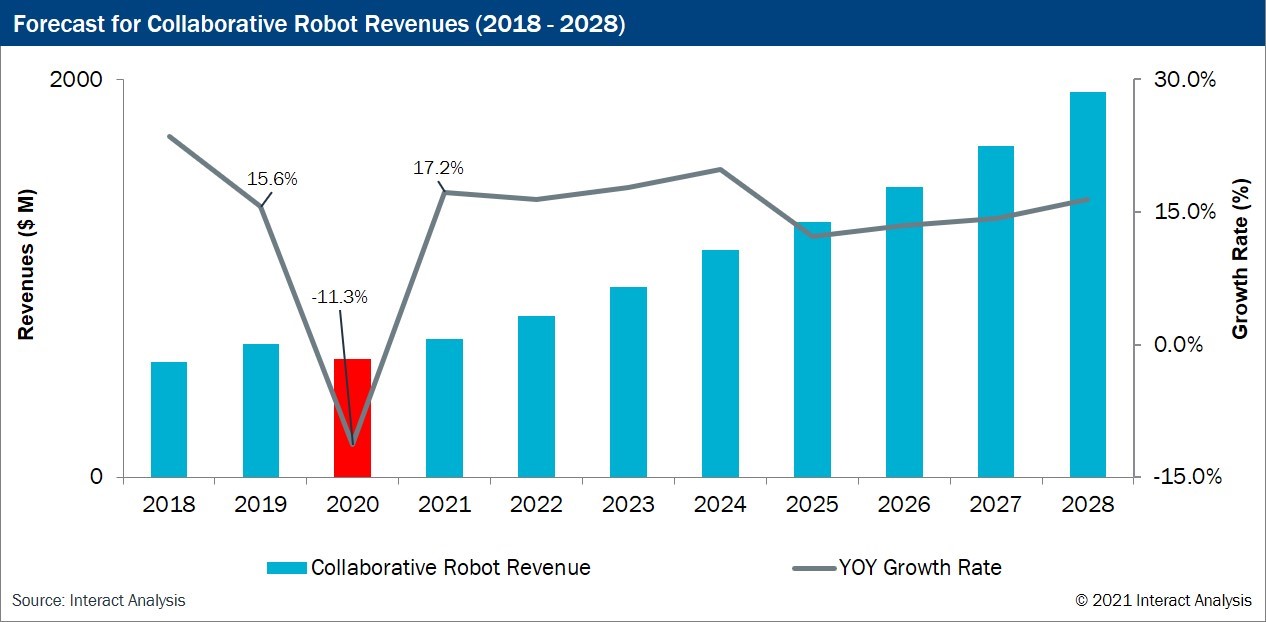
Dugoročno gledano, teško je reći koje će biti naše ljudske uloge unutar visoko automatiziranih proizvodnih primjena u budućnosti. Zasad prodaja kolaborativnih robota predstavlja 5% ukupnog tržišta robota. Pretpostavlja se eksponencijalni rast prodaje kobota, kako će sve više proizvođača i inženjera s njima dolaziti u doticaj.
Koboti 2023.- 2043.
Najnovije izvješće IDTechEx-a "Kolaborativni roboti (koboti) 2023.-2043.: Tehnologije, proizvođači i tržišta" duboko zaranja u gore navedene primjene i zadatke kobota, s dubinskom analizom ključnih tehnologija, proizvođača i tržišta s preciznim prognozama za sljedećih 20 godina. U njemu se ističe kako je možda najistaknutija današnja primjena kobota sastavljanje automobila i poliranje njihove površine. Uz sve veću popularnost električnih vozila, mnoge postojeće proizvodne linije automobila trebaju naknadnu ugradnju ili rekonstrukciju. Jedna od bolnih točaka velikih proizvođača automobila je ta da se u slučaju kvara jednog industrijskog robota, cijela proizvodna linija mora zatvoriti kako bi se osigurala sigurnost ljudskih zaposlenika tijekom inspekcije. Taj proces mogao bi dovesti do značajnih troškova i zastoja. Međutim, koboti mogu biti idealno rješenje jer ljudski zaposlenici mogu blisko surađivati s njima, bez utjecaja na druge robote. U međuvremenu, veliki proizvođači automobila (primjerice, Audi, Volkswagen, itd.) najavili su "inteligentne tvornice", u kojima žele poboljšati fleksibilnost svoje proizvodnje poboljšanjem interakcije čovjeka i robota. Zahvaljujući njihovoj fleksibilnosti, britanski konzultanti IDTechEx predviđaju da će koboti u industriji proizvodnje automobila imati prosječni CAGR od 27,2% u sljedeća dva desetljeća.
Suvremena prehrambena industrija prelazi na proizvodnju vrlo različitih proizvoda malih količina (engl. High-Mix Low-Volume, HMLV), također poznatu kao proizvodnju prema narudžbi, što zahtijeva sve veću fleksibilnost proizvodnje. Rastuća potražnja za kombiniranim prehrambenim proizvodima također dovodi do sve veće potražnje za pakiranjem. Nevjerojatno, ali danas se većina pakiranja još uvijek obavlja ručno. Budući da pakiranje zahtijeva robote s malom nosivošću i visokom fleksibilnošću, to može biti idealna prilika za korištenje kobota. Iako industrija hrane i pića povijesno nije bila primarna, ciljana industrija za kobote, IDTechEx je primijetio da sve više proizvođača kobota počinje koristiti strategiju "dugog štapa" i ulagati sve veće napore u industriju hrane i pića, kao obećavajućeg područja za sljedećih 20 godina.
Kolaborativni roboti u različitim industrijama
Elektronička industrija nova je prilika za kolaborativne robote. U toj industriji zadatak kobota je provjera kvalitete elektroničkih sklopova, uključujući inspekciju telefonskog čipa, PCB provjeru i PC procesor. Iako se vjeruje da će u sljedeća dva desetljeća godišnja isporuka pametnih telefona i osobnih računala ostati stabilna, ili se blago smanjiti, IDTechEx vjeruje da će globalna potražnja za PCB-ima nastaviti rasti zbog sve veće potražnje za elektronikom. Nadalje, u usporedbi s ručnom kontrolom, korištenje kobota za provjeru elektroničkih sklopova može značajno povećati učinkovitost i točnost te minimizirati potencijalne ljudske pogreške. Ipak, unatoč rastu, IDTechEx vjeruje da povećanje uvođenja kobota u toj industriji neće biti tako brzo kao u gore navedenim područjima.
Medicinska industrija i briga o starijim osobama područja su za kolaborativne robote. Podsektor unutar tog područja su koboti u kirurškim primjenama, gdje kirurzi daljinski upravljaju kobotima za izvođenje operacije. Osim toga, mobilni koboti također se mogu široko koristiti u domovima za starije osobe, kao pomoć zdravstvenim radnicima. IDTechEx je primijetio povećanje ulaganja u to područje, što je i logično, s obzirom na široko rasprostranjeno starenje stanovništva.
Senzori su jedna od najvažnijih tehnologija koje omogućuju kolaborativne robote. Najtipičniji senzori koji se koriste u kobotima za sigurnost su senzori zakretnog momenta, gdje je raspon vrijednosti senzora unaprijed postavljen, a ako dođe do sudara, vrijednost će premašiti raspon, što pokreće hitno zaustavljanje robota. Međutim, IDTechEx je primijetio brojne nove senzore (primjerice taktilne, blizinske, itd.) za povećanje sigurnosti, ali oni nisu široko prisutni na tržištu.

Cijena kobota
U potrazi za kupnjom kobota, jedna od najvažnijih stvari koju proizvođači uzimaju u obzir je cijena. Fizički su koboti prilično mali, pa stoga mnogi očekuju da bi trebali biti jeftiniji od konvencionalnih industrijskih robota. Često vizualno i ne djeluju skupo, jer izgledom podsjećaju na obojene cijevi, poput onih vodoinstalaterskih. Nažalost, cijene kobota dosta su visoke, iako se mogu pronaći i oni jeftiniji.
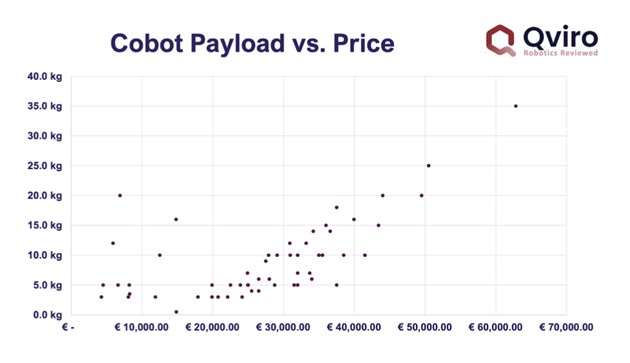
Qviro.com je belgijska B2B platforma, koja pomaže kupcima robotske tehnologije da donesu pouzdane odluke za automatizaciju svog poslovanja. Na temelju Qvirova istraživanja na 56 kobota, prosječna cijena kobota je 27.158 €. Cijene kobota linearno su povezane s njihovom nosivošću.
Primjeri prosječnih cijena nosivosti kobota: kobot nosivosti 5 kg, čija je ekvivalentna cijena oko 25.000 €; kobot nosivosti 10 kg, prosječne cijene 35.000 €, i kobot nosivosti 15 kg, čija bi cijena bila oko 45.000 €. Uz sve veći broj kobota na tržištu, nekoliko tvrtki izaziva tržište relativno niskim cijenama za kobote veće nosivosti. Njihov glavni cilj je osvojiti tržišni udio bez fokusiranja na profit.
Sami troškovi implementacije kobota općenito su dva do tri puta veći od stvarne cijene kobota.
Savjet koji daje Qviro – kupnja kobota sama za sebe ne daje potpunu sliku troškova, već bi trebala uključivati ukupne troškove nabave, primjerice, ruku kobota, periferne dijelove (priložene i dodatke potrebne za specifične proizvodne potrebe) i integraciju kobota u proizvodnu liniju.
Osnovni pick and place kobot obično zahtijeva samo jednostavnu hvataljku s dva prsta kao periferni dio pričvršćen na kobot, što je financijski povoljnije.
Kad je riječ o složenijoj primjeni, kao što je kobot koji skuplja kutije ili predmete, takvi koboti zahtijevaju poseban softver, sustave strojnog vida i periferne dijelove, kao što su posebne hvataljke.
Što se kobot jednostavnije i brže može instalirati i postaviti, to je niža cijena integracije. Ako su periferni dijelovi komercijalno dostupni kao plug and play, neće biti potrebe za složenim programiranjem komponenti.
Kad je riječ o troškovima kobota u primjeni, ako je cilj kobota biti u stabilnoj i nepromjenjivoj proizvodnoj liniji, troškovi će biti relativno niski.